Eureka Additive
SOLUZIONE SOFTWARE COMPLETA PER TECNOLOGIE DED E FFFF
Percorso utensile multi-asse per macchine CN e robot. Simulazione termica in tempo reale. Simulazione lavorazioni ibride.
Generazione del percorso in 5 Assi
Creazione su basi esistenti, planari o cilindriche
- Slicing Multidirezionale
- Slicing Cilindrico
- Forme di rivoluzione
- Forme tubolari.
La generazione del percorso può avvenire o direttamente in Eureka importando modelli STL, o all’interno di Rhinoceros (c), tramite un plugin di Eureka Additive.
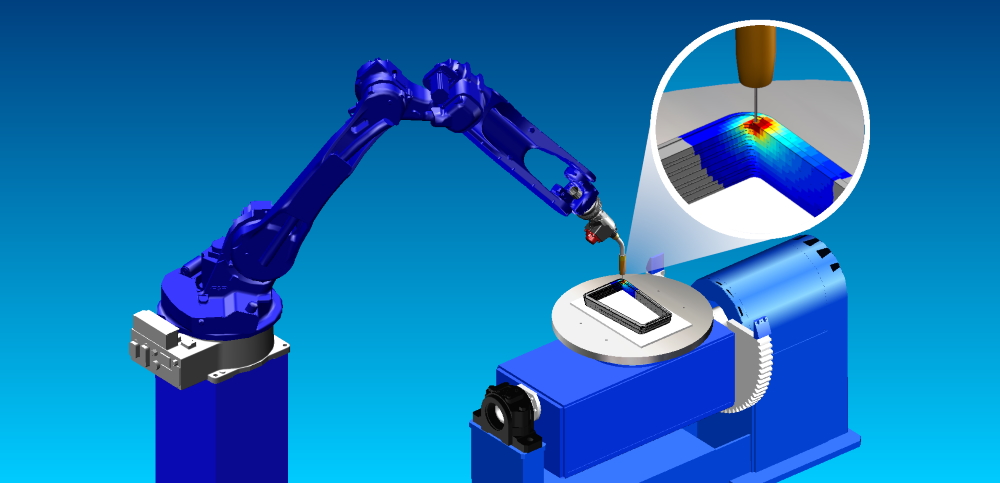
Simulazione Termica
Simulazione in tempo reale
Mappa a colori
Raffreddamento automatico in caso di surriscaldamento della parte
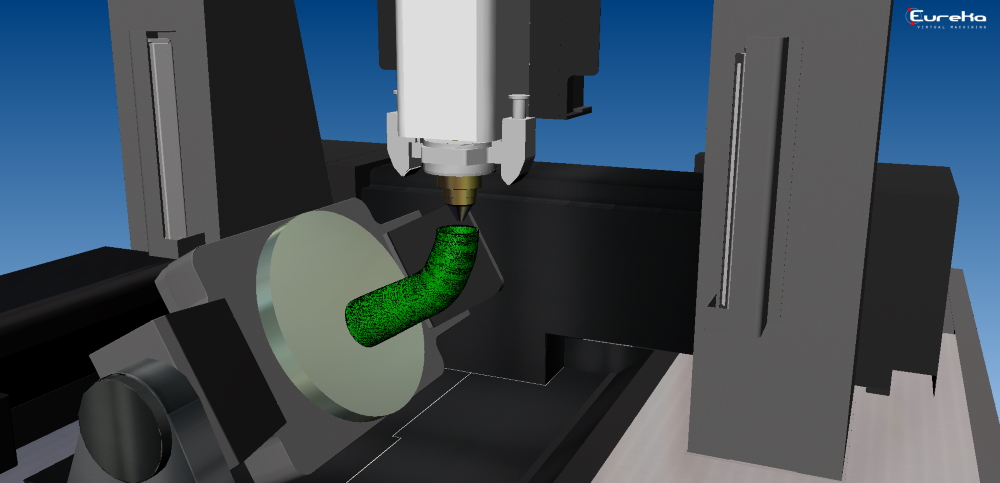
Lavorazioni Additive con macchine CNC
Supporto per qualsiasi cinematica 5 Assi: Tavola-Tavola, Testa-Testa o Testa-Tavola.
Completa simulazione G-code.
Lavorazioni ibride.
Rilevamento coliisioni con grezzo dinamico.
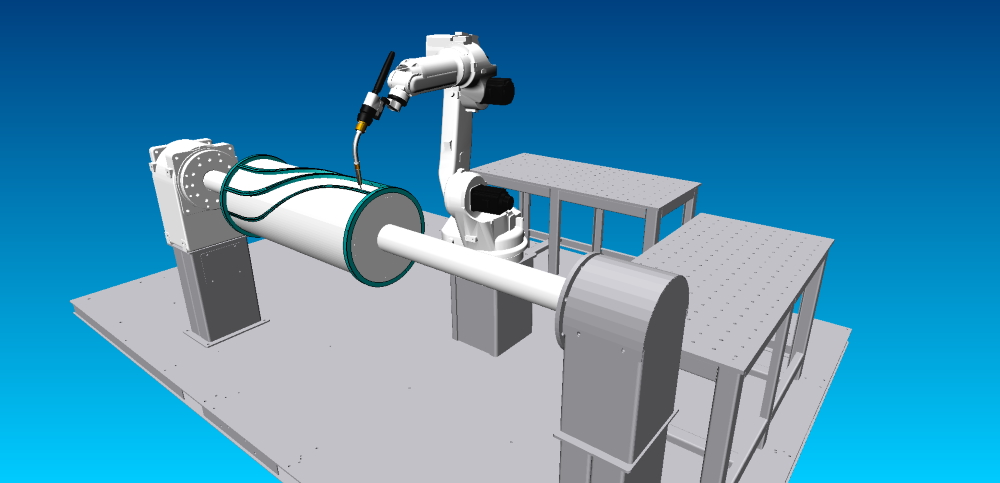
Lavorazioni Additive con robot
Supporto per tutti i robot industriali (ABB, Fanuc, Kuka, Comau, Staubli, Hyundai, Yaskawa, OTC, Kawasaki, UR)
Supporto per qualsiasi combinazione di assi esterni e configurazioni multi-robot.
Rilevamento di singolarità, fine-corsa e collisioni.
Scelta della strategia di ottimizzazione per gli assi del robot e gli assi esterni.