Eureka G-Code
INCREASES PRODUCTIVITY, AVOIDS COLLISION ISSUES
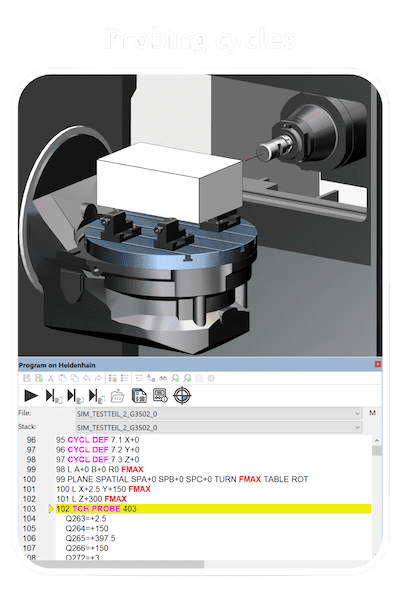
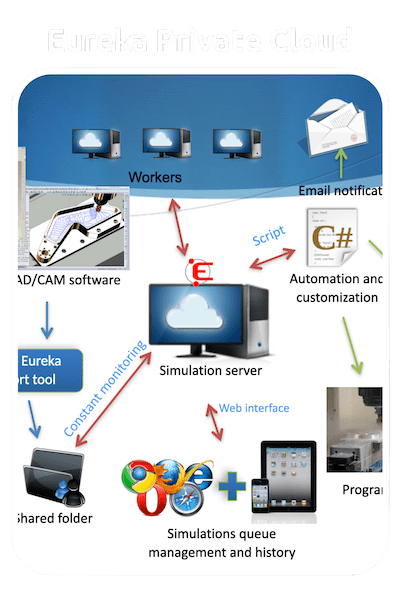
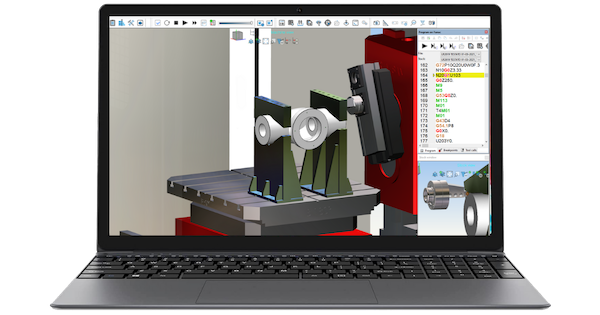
Eureka performs a complete 3D-simulation of machine tools through a simple and intuitive graphical interface, starting from the G-code.
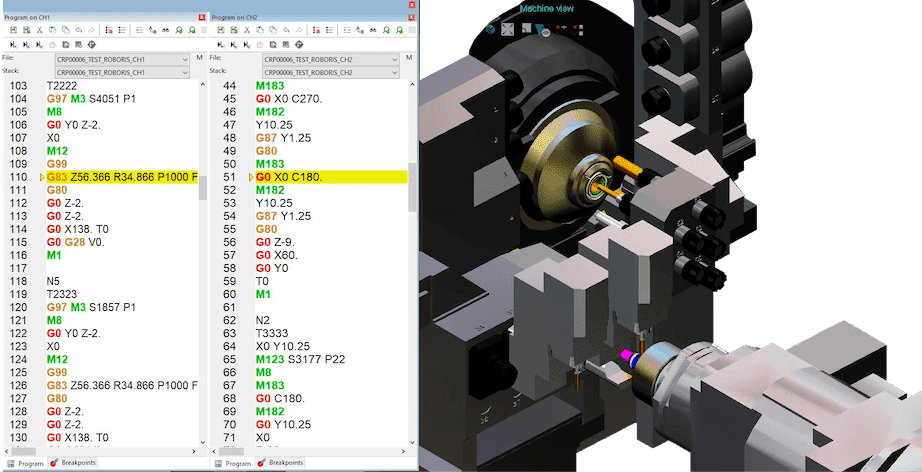
Verify the ISO programs of the machine considering macros, subroutines and cycles
The majority of CAM programs simulations do not consider macros, subroutines and cycles. The CAM simulation doesn't consider the “machine zero", axis strokes, or the management of multi-heads and do not manage multi-heads, machines with more than 5-axes and also probing routines.
Eureka G-Code simulates the actual G-code regardless of how it was created, either manually, or post processed from a CAM Program. Eureka performs simulation based on a highly accurate and reliable “digital twin” of the machine tool and CNC controller.
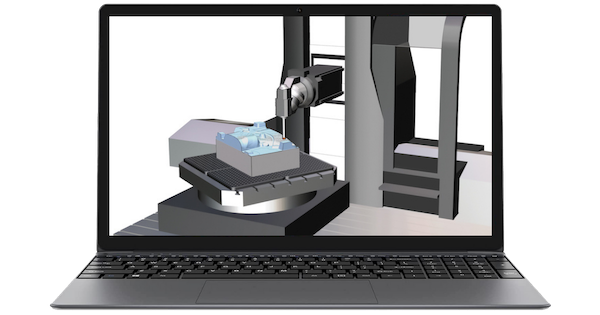
Find the best set-up without taking the real machine out of production
The setup of machines and prove out of G-code programs can be a very long and costly process with a negative impact on production times, time-to-market and profitability.
With Eureka G-Code you can reduce machine setup time by up to 80%. In Eureka you can simulate and verify all ISO programs created either manually or post-processed from a CAM system.
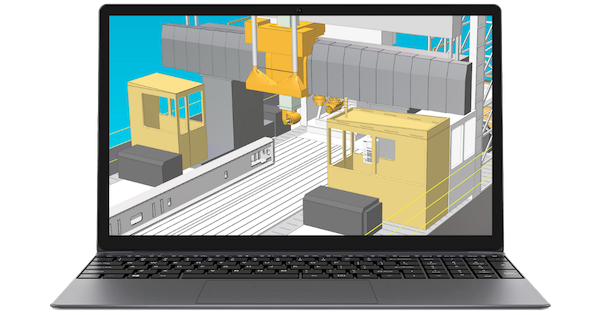
Avoid the risk of collision, damage and downtime caused by programming errors
Programming errors are often the cause of collisions and damage. The result is wasted programming hours, damage of expensive workpieces, tools breaking and collisions with machine parts such as the spindle.
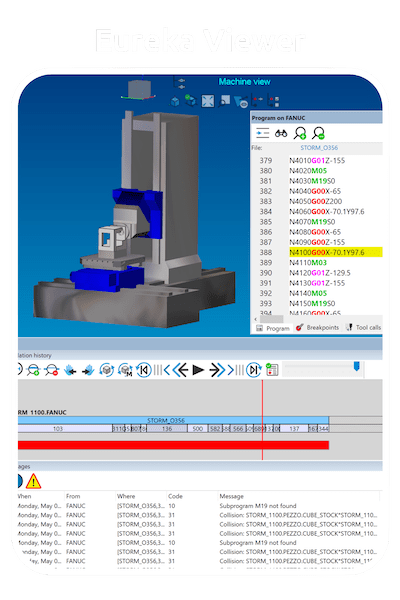
Thanks to the perfect digital replica of Eureka G-Code you can check and simulate your ISO programs comfortably seated at your PC and avoid costly programming errors that cause collisions and wasted time.
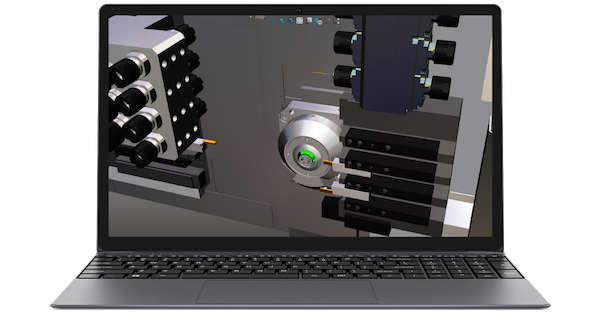
Reduce machining time and reduce your tool costs by optimizing cutting conditions
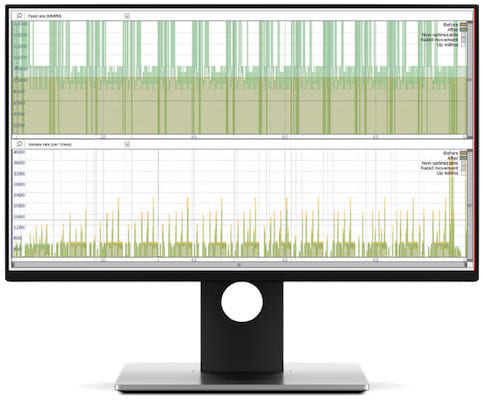
Thanks to a sophisticated digital-twin of the material removal process and to an innovative method patented by Roboris, Eureka automatically optimizes the cutting conditions of the tools by modulating the feed rate to reduce the cycle time, increase the life time of the tool, decrease the stress on the machine axes and improve the consumption of electrical energy.
Find out more >>
Analyze the simulation result to discover gouges, excess material, anomalies or to find bottlenecks and optimize cycle time
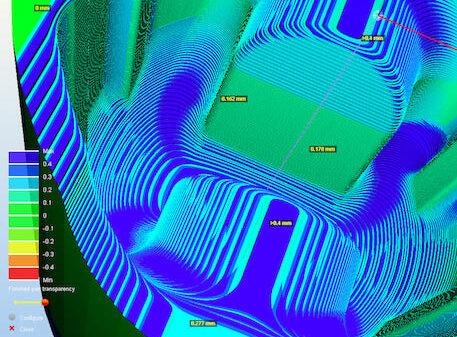
With Eureka you can have a highly accurate comparison tool between the machined part and the 3D finished part. This tool allows you to compare the CAD model of the finished product directly with the model of the machined blank obtained in simulation to identify and measure any differences, identifying gouges, excesses of material or other inconsistencies.
Some of the applications of Eureka G-Code

What customers say about Eureka G-Code
PFC Brakes
“Eureka software has allowed us to go straight to production on new parts without having to tie up the machine proving out our programs. This would usually take a few hours per part. This has been very beneficial as we are moving 100’s of parts.
– PFC Brakes Sr. Mfg. Engineer said:
Digitrace Ltd
“we do not run a 5-axis CNC project without first simulating in Eureka”.
– Phil Hilaski – Digitrace Sr. CADCAM Programmer said:
GZ Programming Solutions, LLC
“Eureka offers a very clean and efficient interface. It’s easy to use and has a very good G-code editor.” He added “I can work on any CNC machine/controller and Eureka lets me build a reliable machine simulation in a short time. The tool building interface is also extremely powerful and straightforward to use.”
– Germano Zerbini – Sr. Manufacturing Consultant